
Implementing and Improving Existing Accelerometer and Gyroscope Calibration Algorithms (project, also includes improving some known approaches)
In this project, the primary objective was to calibrate the accelerometer and gyroscope of an Inertial Measurement Unit (IMU) and ensure that both sensors’ coordinate axes are properly aligned. I implemented the accelerometer calibration algorithm described, as well as an improved version of the gyroscope and inter-triad calibration algorithms developed in [1] and [2]. (Details are limited due to contractual obligations.)
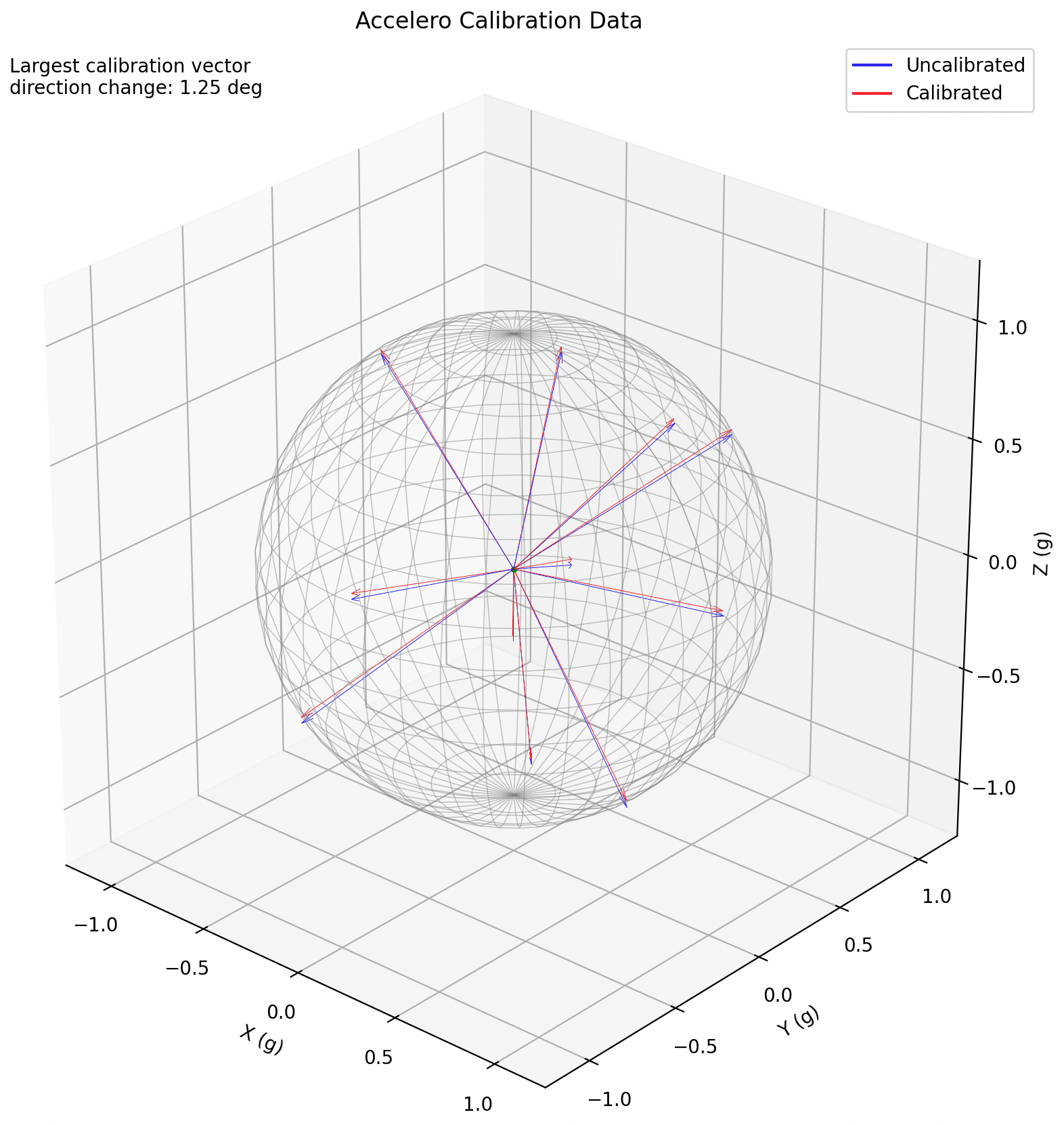
For accelerometer calibration, the device is placed in various orientations. From these measurements, the algorithm estimates calibration parameters, leveraging the principle that the norm of the accelerometer measurement vector is equal to the magnitude of the specific force.
Traditional gyroscope calibration often employs a high-precision two-axis or three-axis turntable, which can be expensive and sensitive to mechanical precision. In contrast, the method from [2] allows calibration using only a flat surface and an object on which the IMU can be affixed. By manually sliding the IMU in different orientations, the approach exploits the fact that the norm of the measured gyroscope output corresponds to the rotational velocity input.
However, manual calibration may not be sufficiently precise for inter-triad alignment, making a one-axis turntable preferable. Since full technical details are provided in [1] and [2], below is a selection of media illustrating the implemented calibration algorithms.
References
-
Hongliang Zhang, Yuanxin Wu, Meiping Wu, Xiaoping Hu, & Yabing Zha (2008).
A Multi-Position Calibration Algorithm for Inertial Measurement Units.
AIAA Guidance, Navigation and Control Conference and Exhibit, August 2008.
DOI: 10.2514/6.2008-7437 -
Hongliang Zhang, Yuanxin Wu, Wenqi Wu, Meiping Wu, & Xiaoping Hu (2010).
Improved Multi-Position Calibration for Inertial Measurement Units.
Measurement Science and Technology, 21(1).
DOI: 10.1088/0957-0233/21/1/015107